VLBI Reconstruction Dataset
A Dataset Designed to Train and Test Very Long Baseline Interferometry Image Reconstruction Algorithms
EHT Imaging Challenge
Welcome to the Event Horizon Telescope Imaging Challenge Webpage! This challenge is meant to help us understand the performance of different imaging algorithms on future Event Horizon Telescope (EHT) data. We hope the results of the challenge will help us better understand the biases of each imaging algorithm, and aid in developing better methods.- Testing Data and Submission Instructions
- Data Parameters and Noise Properties
- Sample Data With Ground Truth Images
- Past Challenges
- Data Formats and Conversion
- Sample Imaging Script
- Questions and Feedback
Testing Data and Submission Instructions
Data Parameters and Noise Properties
| Dataset Number | Source Location | Telescopes | Total Flux (Janskys) | Noise Property |
| 1 | Sgr A* | SMA, JCMT, SMT, LMT, ALMA, APEX, PV, SPT | 2 | Thermal & Atmospheric & Scattering |
| 2 | Sgr A* | SMA, JCMT, SMT, LMT, ALMA, APEX, PV, SPT | 2 | Thermal & Atmospheric & Scattering |
| 3 | Sgr A* | SMA, JCMT, SMT, LMT, ALMA, APEX, PV, SPT | 2 | Thermal & Atmospheric & Scattering |
Thermal Noise
The standard deviation of thermal noise
introduced in each measured visibility is fixed based on
bandwidth (), integration time (
), and each telescope’s System
Equivalent Flux Density (
). A factor of 1/0.88 is included due to the effect of 2-bit quantization.
Atmospheric Noise
Inhomogeneities in the atmosphere cause the light to travel at different velocities towards each telescope. The atmosphere affects an ideal visibility (spatial frequency measurement) by introducing an additional phase term:
where and
are the phase delays introduced
in the path to telescopes k and j respectively. A common technique to eliminate the effect of atmospheric errors is to use closure phases.
Systematic (site-based) gain errors are introduced as errors in the SEFD used for calibration. A common technique to eliminate the effect of gain errors is to use closure amplitudes.
For each site, the SEFD used for calibration is modeled as, constant SEFD adjusted for the observed (noisy) opacity provided in the data tables. For each scan, the true site SEFD (used to model the observed visibility signal-to-noise ratio) includes the following adjustments, all modeled as Gaussian random processes with 1-sigma values equal to:
- 10% constant SEFD variation for each site, plus 10% additional scan-by-scan variation
- 10% variation in the true opacity (relevant only to source attenuation, no specific modeling of sky temperature)
SgrA* is believed to change on the order of minutes. To simulate this effect observations taken over the course of the night are sampled from frames of a movie rather than a static image.
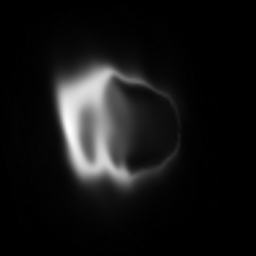
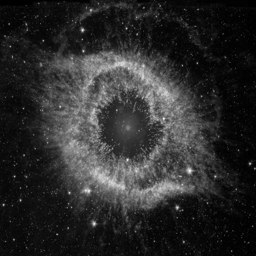
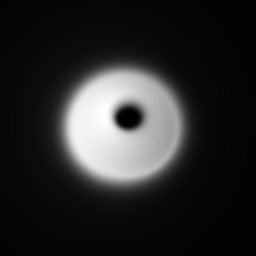
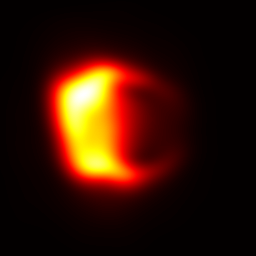
Sample Data With Ground Truth Images
We provide a set of sample data, along with their ground truth images, to help in getting your imaging algorithms working on the blind, test data.Static Emission
You can download the sample data from here. This sample data was generated with the same telescope parameters as the blind, test data. We have included data without any systematic errors or atmospheric errors, data with just atmospheric errors, and data with both systematic and atmospheric errors. Their naming is as follows:| Filename | Property |
| challenge_x_wNoPhaseError | Only thermal noise included in visibility measurements |
| challenge_x | Thermal and phase (atmospheric) errors included in visibility measurements |
| challenge_x_wSystematics | Thermal, amplitude (systematic) and phase (atmospheric) errors included in visibility measurements |




| Sample Number | Source Location | Telescopes | Total Flux (Janskys) | Field of View (arcseconds) |
| 1 | SgrA* | ALMA, SMT, LMT, SMA, SPT, CARMA, PV, PdBI, KP, Haystack | 2 | 0.00016 |
| 2 | SgrA* | ALMA, SMT, LMT, SMA, SPT, CARMA, PV, PdBI, KP, Haystack | 2 | 0.00025 |
| 3 | SgrA* | ALMA, SMT, LMT, SMA, PV, SPT, KP, PdBI | 2 | 0.00016 |
| 4 | SgrA* | ALMA, SMT, LMT, SMA, PV, SPT | 2 | 0.00016 |
| 5 | M87 | ALMA, SMT, LMT, SMA, SPT, CARMA, PV, PdBI, KP, Haystack | 2 | 0.00010 |
| 6 | M87 | ALMA, SMT, LMT, SMA, SPT, CARMA, PV, PdBI, KP, Haystack | 2 | 0.00010 |
| 7 | M87 | ALMA, SMT, LMT, SMA, PV, SPT, KP, PdBI | 2 | 0.00025 |
| 8 | M87 | ALMA, SMT, LMT, SMA, PV | 2 | 0.00010 |
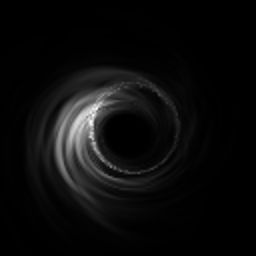
Time-Varying Emission
You can download the sample data from here. This sample data was generated assuming a changing emission image. The video used to generate the results is shown as a log-scale video. We have included data with only thermal error, and data with thermal and atmospheric phase errors. The naming is as follows:| Filename | Property |
| timevarying_wNoPhaseError | In addition to time-varying changes, only thermal noise is included in visibility measurements |
| timevarying | In addition to time-varying changes, thermal and phase (atmospheric) errors are included in visibility measurements |
Past Challenges
Download the data and see results from the 1st EHT Imaging Challenge HEREDownload the data and see results from the 2nd EHT Imaging Challenge HERE
Download the data and see results from the 3rd EHT Imaging Challenge HERE
Download the data and see results from the 4th EHT Imaging Challenge HERE
Download the data and see results from the 5th EHT Imaging Challenge HERE
Data Formats and Conversion
We have provided data in a number of formats (Text File, UVFITS, OIFITS). You can read more about some of these data formats here. You can convert between formats using the Python EHT Imaging Library.Download the EHT Imaging Library:
$ git clone https://github.com/achael/eht-imaging.git
$ cd eht-imaging
Convert between Data Formats in Python 2.7 using the EHT Imaging Library:
import vlbi_imaging_utils as vb
# load data from text file and save out as uvfits and oifits
obs = vb.load_obs_txt('data/challenge_01.txt');
obs.save_uvfits('data/challenge_01_out.uvfits');
obs.save_oifits('data/challenge_01_out.oifits');
# save a normalized oifits file with a true total flux of 2.0 Jy
obs.save_oifits('data/challenge_01_out_normalized.oifits', flux=2.0);
# load data from uvfits file and save out as text file
obs = vb.load_obs_uvfits('data/challenge_01.uvfits');
obs.save_txt('data/challenge_01_out.txt');
# load data from oifits file - oifits does not save polametric quantities
obs = vb.load_obs_oifits('data/challenge_01.oifits');
# load a normalized oifits file with a true total flux of 2.0 Jy
obs = vb.load_obs_oifits('data/challenge_01_out_normalized.oifits', flux=2.0);
Sample Imaging Script
To help you get started, we provide a script that shows you how you can image the sample data provided above using the Python EHT Imaging Library.Download the EHT Imaging Library:
$ git clone https://github.com/achael/eht-imaging.git
$ cd eht-imaging
Image using Bispectrum Maximum Entropy methods in Python 2.7 using the EHT Imaging Library:
| |
|
|
|
 |
 |